| 4 菲尼克斯端子螺釘扭力說(shuō)明 [2015-9-18] |
點(diǎn)擊數(shù):3687 |
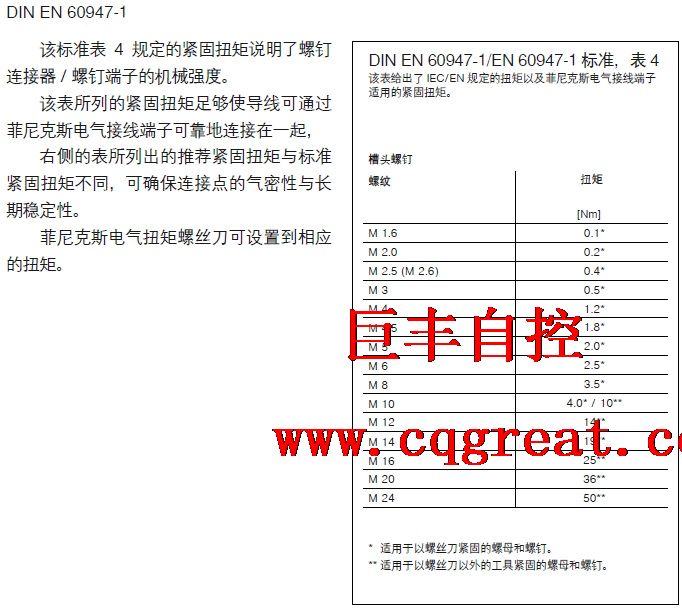
菲尼克斯端子螺釘扭力說(shuō)明
|
| 4 西門子G120變頻器 [2015-9-14] |
點(diǎn)擊數(shù):4002 |
G120學(xué)習(xí)教程第一部分:產(chǎn)品介紹
http://www.ad.siemens.com.cn/service/elearning/cn/SerialVideo.aspx?vsid=162 … |
| 4 端子載流量參考 [2015-3-26] |
點(diǎn)擊數(shù):4516 |
 |
| 4 伺服和變頻的區(qū)別 [2013-3-11] |
點(diǎn)擊數(shù):4730 |
伺服與變頻的一個(gè)重要區(qū)別是: 變頻可以無(wú)編碼器,伺服則必須有編碼器,作電子換向用,交流伺服的技術(shù)本身就是借鑒并應(yīng)用了變頻的技術(shù),在直流電機(jī)的伺服控制的基礎(chǔ)上通過(guò)變頻的PWM方式模仿直流電機(jī)的… |
| 4 工業(yè)以太網(wǎng)交換機(jī)的優(yōu)勢(shì)和選型 [2013-3-11] |
點(diǎn)擊數(shù):4843 |
關(guān)于優(yōu)勢(shì)
(1)功能:工業(yè)以太網(wǎng)交換機(jī)與工業(yè)網(wǎng)絡(luò)通訊更加接近,比如各種現(xiàn)場(chǎng)總線的互通互聯(lián)、設(shè)備的冗余以及設(shè)備要求的實(shí)時(shí)性。
(2)性能:主要體現(xiàn)在適用… |
| 4 光電開關(guān)和接近開關(guān) [2013-3-11] |
點(diǎn)擊數(shù):3431 |
光電開關(guān)和接近開關(guān)的區(qū)別在于檢測(cè)物體的方式,光電開關(guān)的發(fā)射管發(fā)出經(jīng)調(diào)制的光,接收管來(lái)檢測(cè)是否接收到這種光來(lái)判斷是否有物體;而接近開關(guān)是靠其頭部的檢測(cè)頭的感應(yīng)來(lái)判斷物體的存在。
@p… |
| 4 PID控制器參數(shù)整定方法 [2013-3-11] |
點(diǎn)擊數(shù):2969 |
PID控制器參數(shù)整定的方法很多,概括起來(lái)有兩大類:
一是理論計(jì)算整定法。它主要是依據(jù)系統(tǒng)的數(shù)學(xué)模型,經(jīng)過(guò)理論計(jì)算確定控制器參數(shù)。這種方法所得到的計(jì)算數(shù)據(jù)未必可以直接用,還… |
| 4 分析注塑機(jī)的控制 [2012-4-18] |
點(diǎn)擊數(shù):3547 |
現(xiàn)代塑料注塑成型機(jī)是一個(gè)集機(jī)、電、液于一體的典型系統(tǒng),由于這種設(shè)備具有成型復(fù)雜制品、后加工量少、加工的塑料種類多等特點(diǎn),自問(wèn)世以來(lái),發(fā)展極為迅速,目前全世界80%以上的工程塑料制品均采用注塑… |
| 4 伺服電機(jī)和步進(jìn)電機(jī) [2012-4-18] |
點(diǎn)擊數(shù):3372 |
伺服主要靠脈沖來(lái)定位,基本上可以這樣理解,伺服電機(jī)接收到1個(gè)脈沖,就會(huì)旋轉(zhuǎn)1個(gè)脈沖對(duì)應(yīng)的角度,從而實(shí)現(xiàn)位移,因?yàn)椋欧姍C(jī)本身具備發(fā)出脈沖的功能,所以伺服電機(jī)每旋轉(zhuǎn)一個(gè)角度,都會(huì)發(fā)出對(duì)應(yīng)數(shù)量… |
| 4 主軸伺服系統(tǒng)的分類 [2012-4-18] |
點(diǎn)擊數(shù):3226 |
主軸伺服提供加工各類工件所需的切削功率,因此,只需完成主軸調(diào)速及正反轉(zhuǎn)功能。但當(dāng)要求機(jī)床有螺紋加工、準(zhǔn)停和恒線速加工等功能時(shí),對(duì)主軸也提出了相應(yīng)的位置控制要求,因此,要求其輸出功率大,具有恒… |
| 4 解決現(xiàn)場(chǎng)信號(hào)干擾的方法 [2012-4-17] |
點(diǎn)擊數(shù):3311 |
1. 概述
隨著科學(xué)技術(shù)的發(fā)展,PLC在工業(yè)控制中的應(yīng)用越來(lái)越廣泛。PLC控制系統(tǒng)的可靠性直接影響到工業(yè)企業(yè)的安全生產(chǎn)和經(jīng)濟(jì)運(yùn)行,系統(tǒng)的干擾能力是關(guān)系到整個(gè)系統(tǒng)可靠運(yùn)行… |
| 4 4~20mA電流變送器的工業(yè)控制應(yīng)用 [2012-4-17] |
點(diǎn)擊數(shù):3322 |
4~20ma電流環(huán)工作原理
在工業(yè)現(xiàn)場(chǎng),用一個(gè)儀表放大器來(lái)完成信號(hào)的調(diào)理并進(jìn)行長(zhǎng)線傳輸,會(huì)產(chǎn)生以下問(wèn)題:第一,由于傳輸?shù)男盘?hào)是電壓信號(hào),傳輸線會(huì)受到噪聲的干擾;第二,傳輸… |
| 4 淺述伺服技術(shù)在工業(yè)自動(dòng)化中發(fā)展與應(yīng)用 [2012-4-17] |
點(diǎn)擊數(shù):3442 |
隨著人類社會(huì)工業(yè)生產(chǎn)的不斷發(fā)展,生產(chǎn)過(guò)程中需要進(jìn)行檢測(cè)、控制、優(yōu)化、調(diào)度、管理和決策,以達(dá)到增產(chǎn)、提質(zhì)、降耗、確保安全等目的。而工業(yè)自動(dòng)化技術(shù)是應(yīng)上述要求而發(fā)展起來(lái)的一類綜合性高新技術(shù)。從近… |
| 4 矢量控制的基本原理 [2012-3-12] |
點(diǎn)擊數(shù):3328 |
矢量控制的基本原理是通過(guò)測(cè)量和控制異步電動(dòng)機(jī)定子電流矢量,根據(jù)磁場(chǎng)定向原理分別對(duì)異步電動(dòng)機(jī)的勵(lì)磁電流和轉(zhuǎn)矩電流進(jìn)行控制,從而達(dá)到控制異步電動(dòng)機(jī)轉(zhuǎn)矩的目的。具體是將異步電動(dòng)機(jī)的定子電流矢量分解… |
| 4 Modbus通訊注意事項(xiàng)及測(cè)試 [2012-3-12] |
點(diǎn)擊數(shù):3203 |
很多同事在做Modbus通訊時(shí),需要連續(xù)讀取多個(gè)現(xiàn)場(chǎng)設(shè)備的數(shù)據(jù),雖然也編寫了Modbus輪詢的程序,但是有時(shí)還是無(wú)法正常通訊。有時(shí)雖然能夠保證通訊,但是所有現(xiàn)場(chǎng)設(shè)備的輪詢周期很長(zhǎng)。本文將從M… |
|
共計(jì):28條記錄 頁(yè)次:1/2 每頁(yè):15條
1 [2]: |